
近年来,基于图像的三维建模技术因其成本低,操作简单,逼真性高等优势普遍被多行业的使用。以基于图像的建模让图像恢复物体或场景的三维信息构建起集合三维模型并进行三维渲染和编辑。与传统的激光采集不同,图像采集是通过相机镜头的光学投射从而囊括大量的视觉信息线索从而建立逼真且贴合现实环境的三维模型。然而,基于图像建模的技术也有一些常见的问题,该文章列举了这些问题并给出了建议和解决方法。
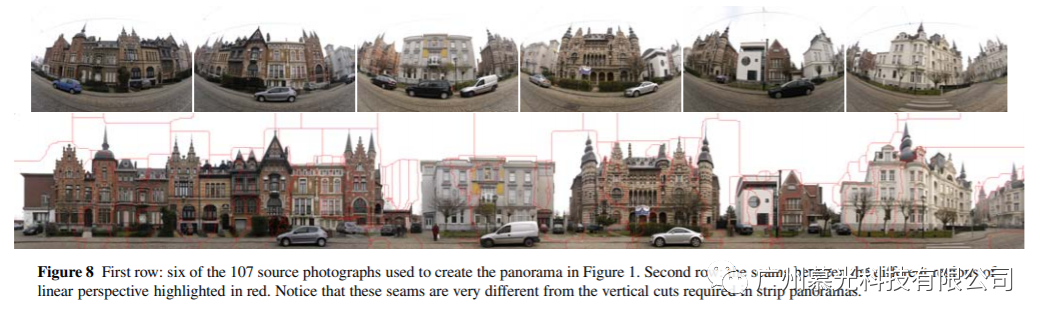
用球幕摄影原理拍摄长物体
一、曝光问题及解决办法
我们面对的图像建模一个常见问题就是曝光。曝光不正确所带来的过曝或者过暗的图片数据都不能建模,因此HDR技术是解决曝光方面问题的手段。HDR在手机摄像上已经比较常见,但手机仅支持16比特的HDR 4级曝光,而真正的曝光HDR是16级。

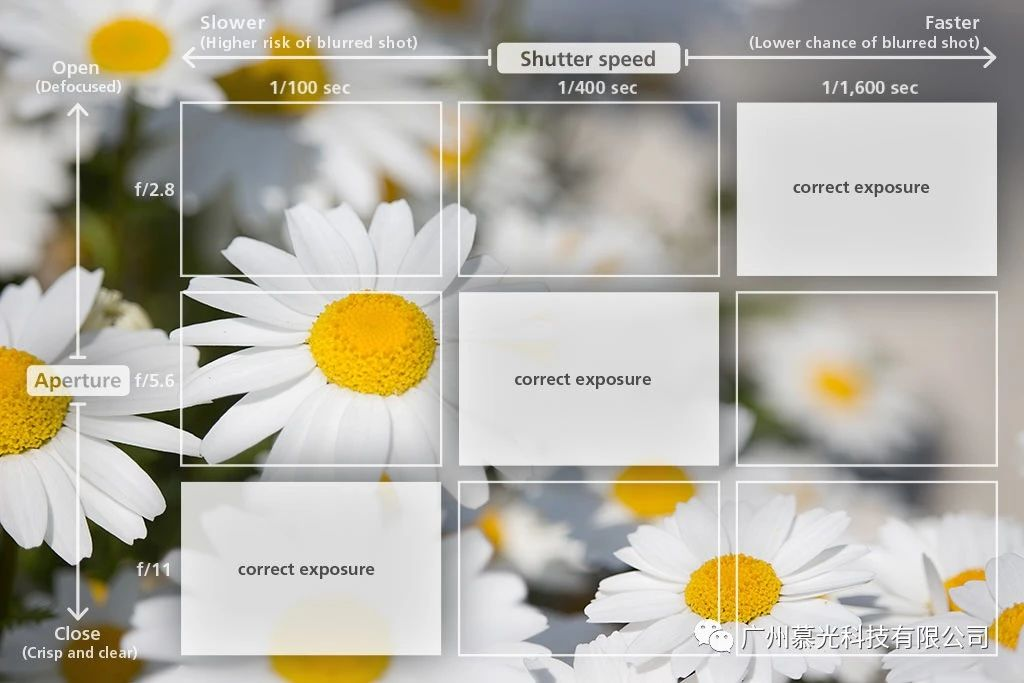
搜索并使用正确的曝光度是照相的关键
二、数据量大问题及解决办法
图像建模所带来的的图像数据量非常庞大。举例而言,圣保罗教堂的建模项目中使用了大约1200张照片,图像建模所产生的的巨大数据量也是项目需要关注的一个问题。对于更大的项目而言,其照片数量的采集将会更大,可以达到上千级别。可以想象到一旦使用相机或者硬盘打开上千张照片的运算量非常巨大。
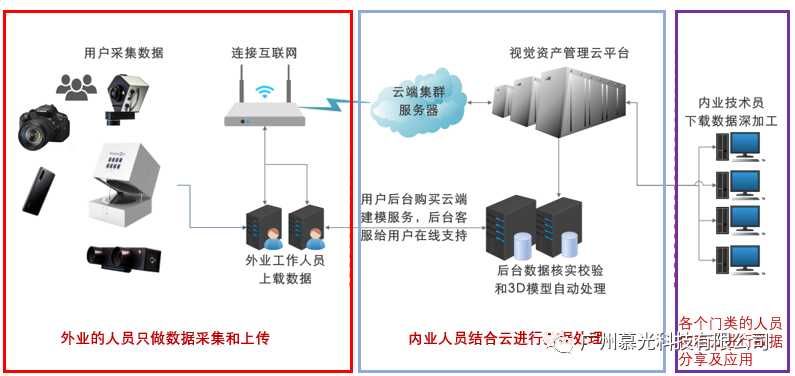
采集硬件与采集硬件与云平台紧密结合—把数据采集/数据加工/数据应用完全融合
使用结构相机能够减少这方面的数据负担并达到相同甚至更为优良的模型效果。结构相机能够产生成对影像,这一对影像并不是两个相机,是经过校正的绑定的一对影像。其能够提供一个绑定值,通过这个绑定值使整个图像建模运算量就会比单独相机的运算量大量减少。与普通相机采集相比,结构相机所产生的影像能够为三维建模减少2/3以上的运算量,所以采集压力和后期数据处理的压力都会大大降低。
绑定一对影像
此外,随着科技的发展,运算成本在不断降低,一个工作站的运算量相当于2010年的十几百倍。虽然对于数据运算的需求是一个显著问题,但是确实是可以克服的,这也解释了为何图像建模法在世界热门的原因。
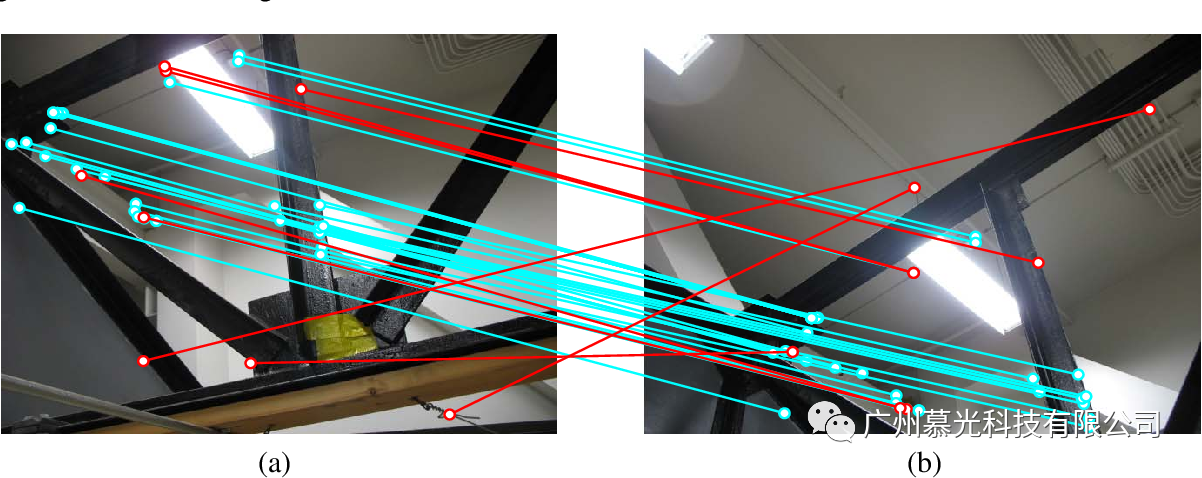
三、同名点问题及解决办法
在影像建模里一个很重要问题就是如何找到同名点?同名点为两个或多个不同照片的像素对应场景中同一物理位置的投影。我们在项目采集工程实施中,一旦出现错漏或采集的方法不正确,就找不到同名点。哪怕采集上千张图片,还是找不到配对的同名点。那么这个问题怎么解决呢?
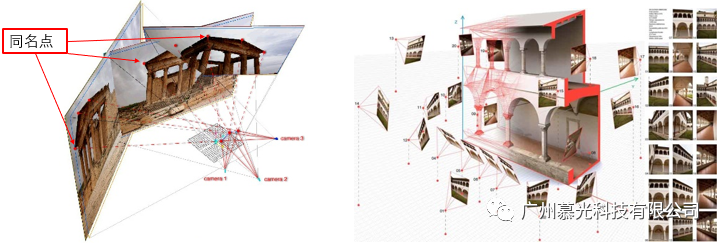
多视角图像逆向采集技术的核心是同名点的辨别
使用球幕影像相机,每一张影像都有一个360度全方位的影像,360度无死角的数据总能找到同名点,这是球幕影像在图片建模里特别大的优势。它使采集的数据量大大减少,同时有效提高数据应用的成功率。在软件使用中,你会发现单张图像很多是找不到配对的同名点。在球幕图像中几乎是不太可能,基本上都能够匹配上。这就是球幕相机的好处。球幕相机操作很简单,几乎不需要任何的摄影技术。
利用高动态EXR影像相位差文件,分离出每一个像素点,用一对像素点对形成的三角关系计算出点与点的距离。由于一次录入的影像已带有尺寸数据,因此不必人手测量和记录,减少人为错误。在需要了解某一部份的尺寸时,只需在影像中选取需要测量的两个点,即时可以显示出所需尺寸,显示值精确可达0.1毫米。对要求测量的数量及范围,设备系统是没有限制的,只要影像中能看到的部份都可以测量,其精度只与拍摄距离有关。同时还可以把测量的数据储存下来或打印出来作为保存。广州慕光科技公司用球幕影像相机做了非常多的项目,包括古建工程、地铁交通以及海上钻井平台等。

使用MG视觉资产管理平台可随时在线上线下共享三维模型及多种多媒体格式文件
文章摘自:CZ